Motor_Lean
CFC charts y CFC Editor
Cree CFC insertando bloques de PCS 7 Library Vxx dentro de CFC. Esto incluye bloques simples, como bloques de circuito cerrado de proceso o para el monitoreo de los valores medidos. Las entradas y salidas de estos bloques son interconectados y los parámetros configurados directamente en el CFC Editor. Una interfaz amigable ayuda en esta tarea.
En CFC, usted trabaja con bloques listos que tienen una función específica. Usted coloca estos bloques de función en el CFC chart, interconecta y asigna parámetros a ellos.
PCS 7 también proporciona Process Tag Types en la biblioteca estándar. Ellos representan CFCs completos para varios Process Tags, como motores y válvulas.
Para mantener una estructura adecuada del proyecto, los CFCs deben ser creados en la debida carpeta de la Plant Hierarchy. En el ejemplo, la carpeta M110 contiene los CFCs LIA114, P113 y V112.

Motor_Lean
La Advanced Process Library (APL) contiene un template para Process Tag Type de accionamiento de motor llamado Motor_Lean.
Al insertar un CFC Process Tag Type en el sistema, una instancia de ese Process Tag Type se creará. Por lo tanto, Motor_Lean es un tipo, un modelo, y, a partir de él, se pueden crear varios motores, convirtiéndose en CFCs. En el proyecto Crushing Soy, los CFC de motor TCR0802A, EL0803A, EL0805A etc. son instancias de Motor_Lean.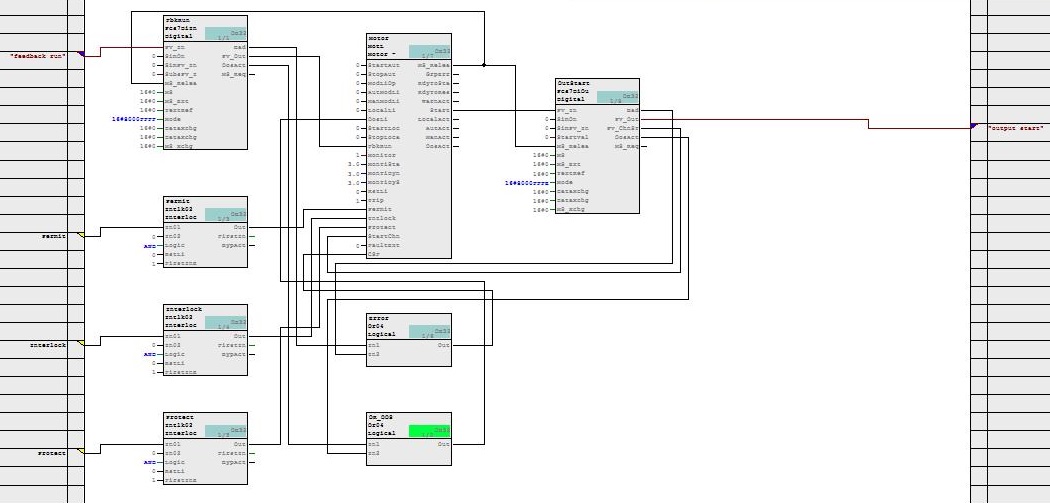
Motor_Lean ordena la activación/desactivación de la señal del motor y supervisa el retorno de la señal de marcha/parada.
En lugar de crear su propia lógica para accionar un motor, utilice Motor_Lean. Es una buena práctica utilizar siempre lógicas disponibles de la biblioteca del PCS 7. Con el tiempo es importante conocer a fondo la biblioteca de PCS 7. Como es muy amplia, difícilmente tendrá que crear sus propios bloques y Process Tag Types. Sin embargo, usted aprenderá cómo crear sus propios bloques más adelante en el curso.
Bloques de Motor_Lean
Motor – MotL – FB1850
Interconexiones:
Entrada
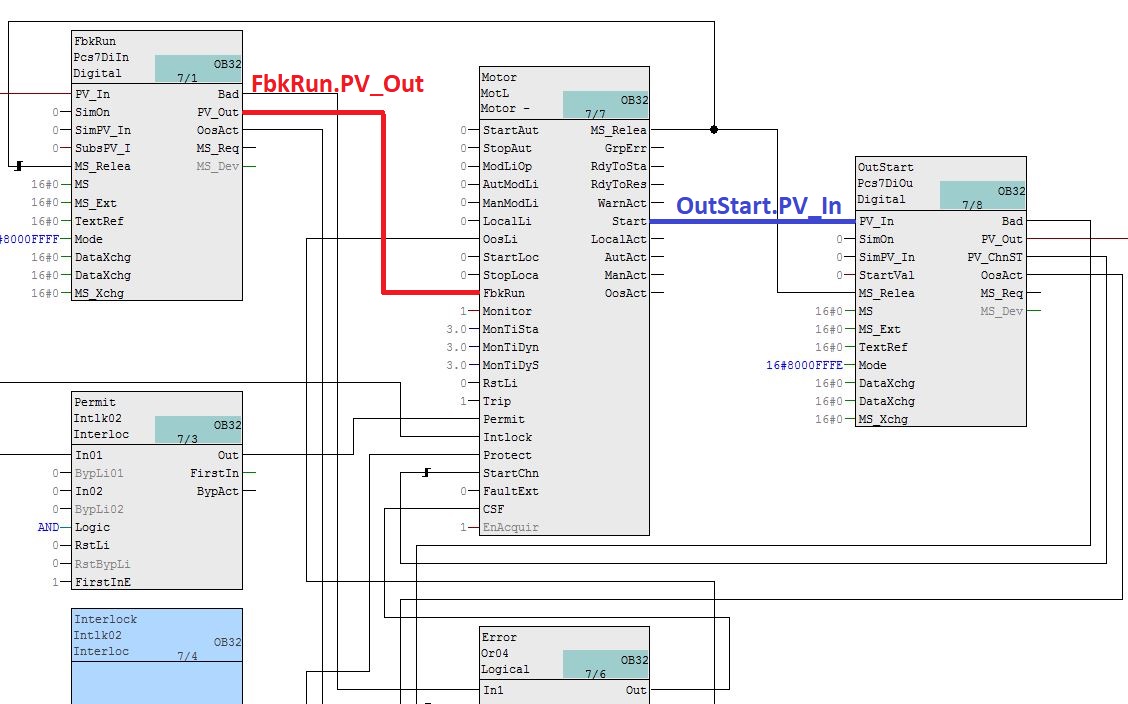
Motor.FbkRun <-- FbkRun.PV_Out (1 = status de motor girando)
Salida
Motor.Start --> OutStart.PV_In (0 = comando parar motor; 1 = comando girar motor)
FbkRun – Pcs7DiIn – FB1871

Interconexiones:
Entrada
FbkRun.PV_In <-- feedback run (1 = status de motor girando - entrada digital)
Salida
FbkRun.PV_Out --> Motor.FbkRun (1 = status de motor girando)
OutStart – Pcs7DiOu – FB1816

Interconexiones:
Entrada
OutStart.PV_In <-- Motor.Start (0 = comando parar motor; 1 = comando girar motor)
Salida
OutStart.PV_Out --> output start (0 = comando parar motor; 1 = comando girar motor - Salida digital)
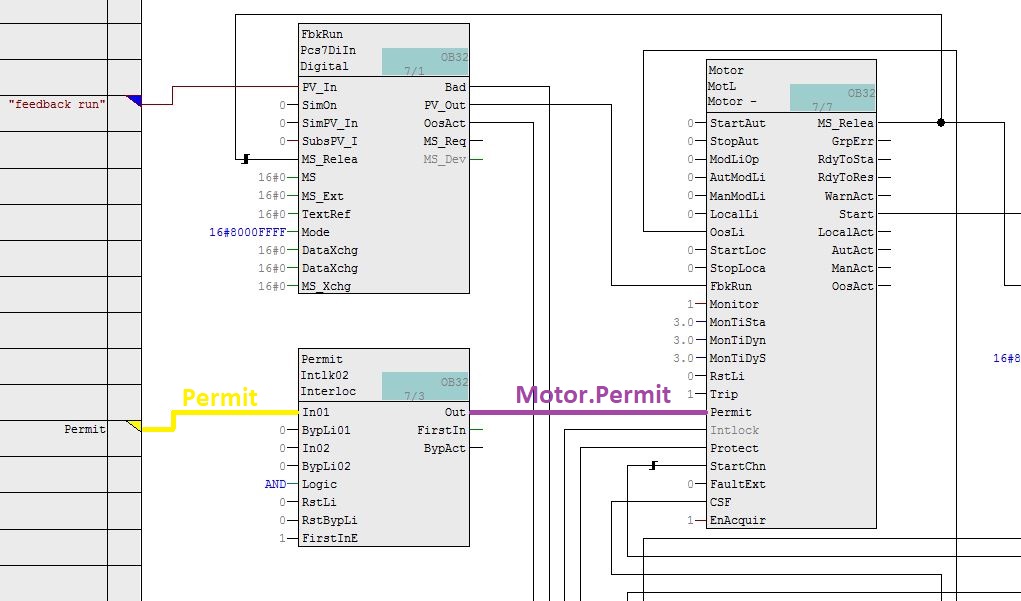
Permit – Intlk02 – FB1824
El parámetro Permitir del bloque Motor (MotL) en Motor_Lean se utiliza para permitir o no permitir el control del motor via OS (Operator Station).
Con el nivel lógico 1 (verdadero), se permite el funcionamiento del motor en el sistema operativo. Con el nivel lógico 0 (falso), no se permite el funcionamiento del motor a través de OS. El valor predeterminado del parámetro es el nivel lógico 1.
El parámetro Perm_En habilita o deshabilita la acción del parámetro Permit. Con el nivel lógico 1, Permit está habilitado (predeterminado).
Interconexiones:
Entrada
Permit.In01 <-- Permit (condición externa)
Salida
Permit.Out --> Motor.Permit (1 = comando permitido en OS)
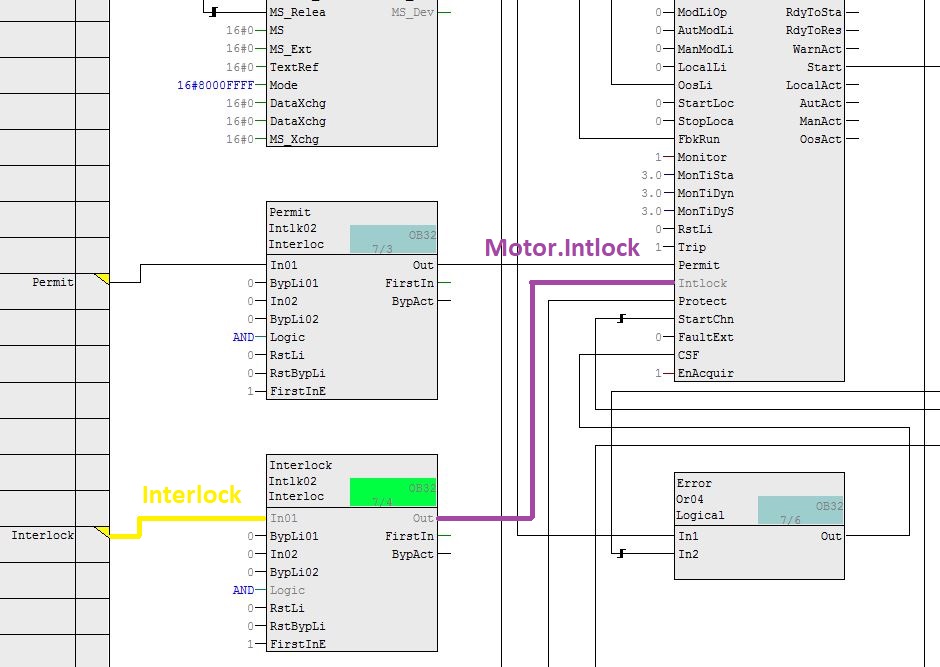
Interlock – Intlk02 – FB1824
El parámetro de bloqueo Intlock del motor (MotL) en Motor_Lean se utiliza para habilitar o deshabilitar el bloqueo sin reset.
Con el nivel lógico 1 (true), Interlock no se activa. Con nivel lógico 0 (falso), se activa el enclavamiento sin reset. El motor puede funcionar sin reset, siempre que haya desaparecido la condición de bloqueo. El valor predeterminado del parámetro es el nivel lógico 1 (deshabilitado).
El parámetro Intl_En habilita o deshabilita la acción del parámetro Intlock. Con el nivel lógico 1, Intlock está habilitado (predeterminado).
Interconexiones:
Entrada
Interlock.In01 <-- Interlock (condición externa)
Salida
Interlock.Out --> Motor.Intlock (1 = interbloqueo sin reset)
Protect – Intlk02 – FB1824
El parámetro Protect del bloque Motor (VlvL) en Motor_Lean se utiliza para activar o desactivar el bloqueo de protección.
Con el nivel lógico 1 (verdadero), la protección no está activada. Con nivel lógico 0 (falso), se activa el enclavamiento de protección. El motor se puede operar después de un reset, siempre que haya desaparecido la condición de enclavamiento. El valor predeterminado del parámetro es el nivel lógico 1 (deshabilitado).
El parámetro Prot_En habilita o deshabilita la acción del parámetro Intlock. Con el nivel lógico 1, Protect está habilitado (predeterminado).

Interconexiones:
Entrada
Protect.In01 <-- Protect (condición externa)
Salida
Protect.Out --> Motor.Protect (1 = interbloqueo protetivo desactivado)
OR_OOS – Or04 – FC364
El parámetro OosLi del bloque Motor (MotL) en Motor_Lean se utiliza para poner el motor fuera de servicio mediante interconexión.
Con el nivel lógico 1 (verdadero), el motor está fuera de servicio. Con nivel lógico 0 (falso), el motor está en marcha. El valor predeterminado del parámetro es el nivel lógico 0 (motor en marcha).
En Motor_Lean, el bloque OR_OOS realiza una lógica OR con dos entradas. Si una o más entradas tienen nivel lógico 1, la salida del bloque pasa al nivel lógico 1. Ambas entradas indican si los dispositivos de campo se mantienen o no. Los dispositivos son la retroalimentación del estado del motor (entrada digital) y el comando (salida digital). La salida del bloque OR_OOS está interconectada con el parámetro de entrada OosLi del bloque Motor.

Interconexiones:
Entradas
OR_OOS.In1 <-- FbkRun.OosAct (1 = dispositivo de campo está en mantenimiento)
OR_OOS.In2 <-- OutStart.OosAct (1 = dispositivo de campo está en mantenimiento)
Salida
OR_OOS.Out --> Motor.OosLi (1 = motor en modo fuera de servicio, vía interconexión)
Error – Or04 – FC364
El parámetro Motor block CSF (MotL) en Motor_Lean se utiliza para indicar un error externo (control system error).
Con nivel lógico 1 (verdadero), se activa el error externo. Con nivel lógico 0 (falso), no hay error externo. El valor predeterminado del parámetro es el nivel lógico 0 (sin error externo).
En Motor_Lean, el bloque Error ejecuta una lógica OR con dos entradas. Si una o más entradas tienen nivel lógico 1, la salida del bloque pasa al nivel lógico 1. Las dos entradas indican si los dispositivos de campo tienen valores de proceso válidos (parámetro Bad). Cuando el parámetro de salida Bad de los bloques FbkRun y OutStart está en el nivel lógico 1, indica que el valor del proceso no es válido. Los dispositivos son la retroalimentación del estado del motor (entrada digital) y el comando (salida digital). La salida del bloque Error está interconectada con el parámetro de entrada CSF del bloque Motor.

Entradas
Error.In1 <-- FbkRun.Bad (1 = valor de proceso inválido)
Error.In2 <-- OutStart.Bad (1 = valor de proceso inválido)
Salida
Error.Out --> Motor.CSF (1 = error externo)
MotL – motor (Large)
Type + Number: FB1850
Family: Drives
MotL controla un motor con una señal de salida.
El bloque MotL debe instalarse en un cyclic interrupt OB (OB30 a OB38).
MotL modos de operación:
• Local mode
El motor se controla en "Local mode": "Start" (StartLocal = 1) y "Stop" (StopLocal = 1). Un bloque operado en "local mode" es controlado por señales "locales" o señales de retroalimentación (parámetros de entrada FbkStart = 1).
• Automatic mode
El motor es controlado en “Automatic mode”: “Start” (StartAut = 1) y “Stop” (StopAut = 1).
• Manual mode
El motor es controlado en “Manual mode”: “Start” (StartMan = 1) y “Stop” (StopMan = 1).
• Out of service
I/Os de MotL
Algunos parámetros de entrada:
AutModLi – 1 = “Automatic mode” via interconexión o SFC (controlado por ModLiOp = 1)
AutModOp – 1 = “Automatic mode” via operador (controlado por ModLiOp = 0)
AV – Entrada analógica adicional (ej. Corriente del motor)
CSF – 1 = Error externo (error del sistema de control)
FbkRun – Señal de retorno de la salida. 1 = Start y 0 = Stop
ManModLi – 1 = “Manual mode” via interconexión o SFC (controlado por ModLiOp = 1)
ManModOp – 1 = “Manual mode” via operador (controlado por ModLiOp = 0)
ModLiOp – 0 = Operador y 1 = Interconexión o SFC
SimLiOp – Activación/Desactivación de la simulación: 0 = Operador y 1 = Interconexión o SFC
SimOnLi – 1 = Simulaciónn via interconexión o SFC (controlado por SimLiOp = 1)
SimOn – 1 = Simulación on
StartAut – 1 = Girar el motor en “automatic mode”
StartMan – 1 = Girar el motor en “manual mode”
StopAut – 1 = Detener el motor en “automatic mode”
StopMan – 1 = Detener el motor en “manual mode”
Trip – 1 = El motor está en buen estado
Algunos parámetros de salida:
AutAct – 1 = “Automatic mode” habilitado y 0 = “Manual mode” habilitado
AV_Out = Salida del bloque de entrada analógica adicional
FbkRunOut – Retorno del arranque del motor. 1 = Start y 0 = Stop
ManAct – 1 = “Manual mode” habilitado
Run – 1 = Motor está girando
Start – 1 = Control del motor: arrancado
Stop – 1 = Motor parado
Faceplate
MotL standard view
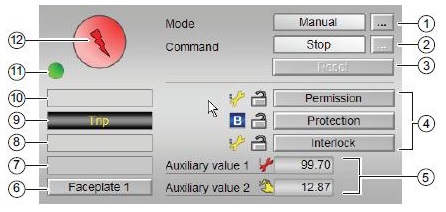
1 – Mostrar y seleccionar el modo de operación
2 – Girar y parar el motor (Start, Stop e Rapid Stop)
3 – Reset del bloque
4 – Funciones de enclavamiento del bloque
Las funciones de enclavamiento del bloque son Interlock, Protection y Permission.
5 – Visualización de los valores auxiliares
6 – Botón de navegación
7 a 10 – Área para indicar estados del bloque
11 – Automatic preview – indica el valor de comando para el motor en automático
12 – Estado del motor (girando/parado)
Tabla de estados del motor:

Block icon
Tabla de block icons de MotL:

Proyecto Crushing Soy
En Plant view, una Master Data Library deve contener las carpetas Models y Process tag types. Estas carpetas no se crean automáticamente después de declarar una biblioteca como Master Data Library. Sin embargo, ambas carpetas se generarán automáticamente cuando cree Models y Process tag types.
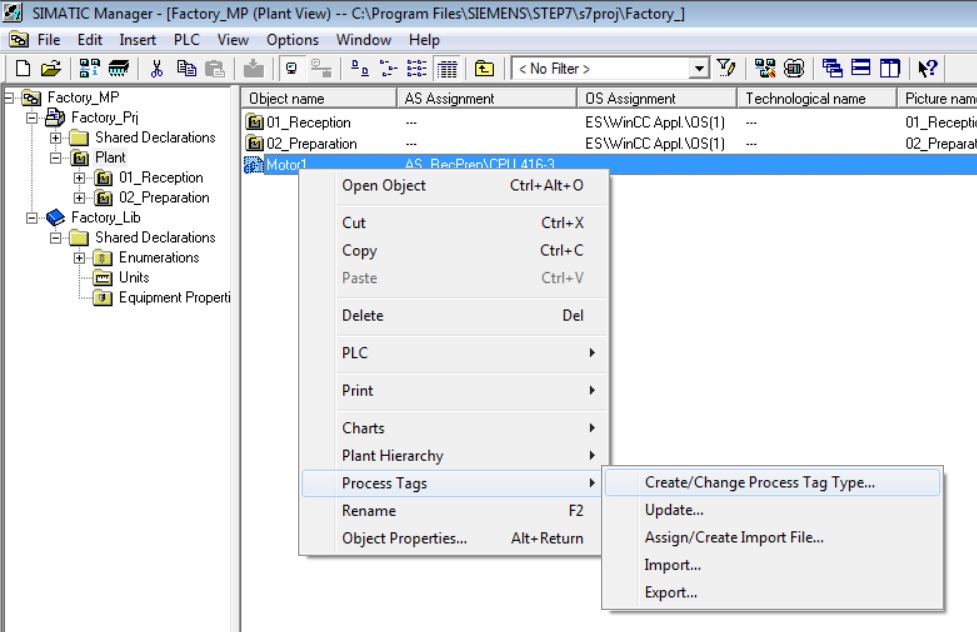
• Crear CFC Motor1 en la carpeta Plant. Haga clic derecho en el objeto Plant y seleccione elemento de menú Insert New Object > CFC.

• Haga clic derecho en el objeto Motor1 y seleccione elemento de menú Process Tags > Create/Change Process Tag Type...
• En la ventana Assistant, haga clic en el botón Next. Se seleccionó la biblioteca Factory_Lib.

• Haga clic en el botón Finish.

• La carpeta Process tag types fue creada en la Master Data Library.

Se puede aplicar un procedimiento similar para crear la carpeta Modelo. Estudiaremos en detalle Process tag types y Models más adelante.
• Abrir APL 8.1 o 9.0 (SIMATIC Manager menu File > Open...). En la pestaña Libraries de la ventana Open Project, seleccionar PCS 7 AP Library Vxx.

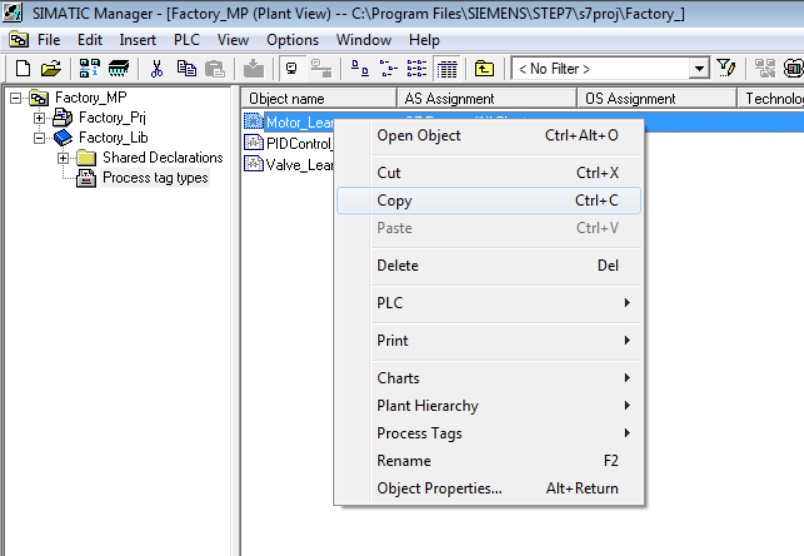
• Copiar Valve_Lean, Motor_Lean y PIDControl_Lean templates a la Master Data Library. En Component View de la APL, carpeta Templates, seleccionar Valve_Lean, Motor_Lean y PIDControl_Lean y copiarlos (Ctrl + C). Mantenga presionada la tecla Ctrl cuando seleccione más de un elemento para copiar.

• Abrir Plant View del proyecto Crushing Soy, carpeta Process Tag Types de la Master Data Library (Factory_Lib) y pegar los templates (Ctrl + V).

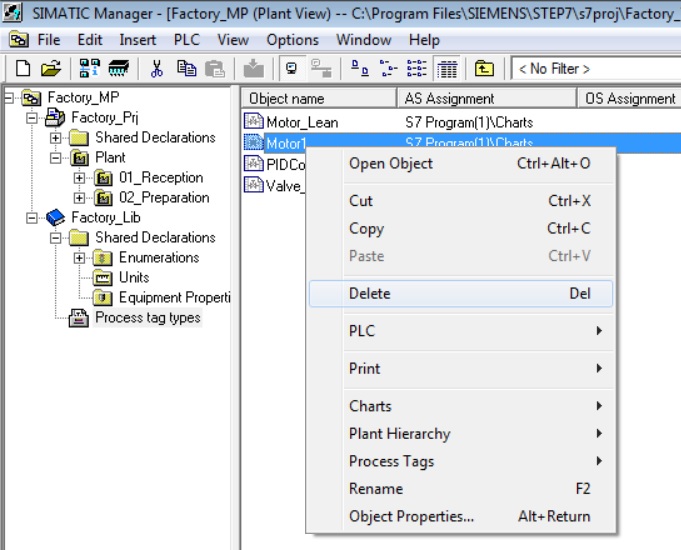
• Borrar CFC Motor1 de la carpeta Plant. Haga clic derecho en el objeto Motor1 y seleccione elemento de menú Delete.

• Haga clic en Yes para confirmar.

• Borrar Process tag type Motor1 de la carpeta Process tag type de la Master Data Library. Haga clic derecho en el objeto Motor1 y seleccione elemento de menú Delete.
• Haga clic en Yes para confirmar.
• Copiar Motor_Lean de la Master Data Library Factory_Lib para 01_Reception\Road_Hopper.
• Renombrar a TCR0802A.

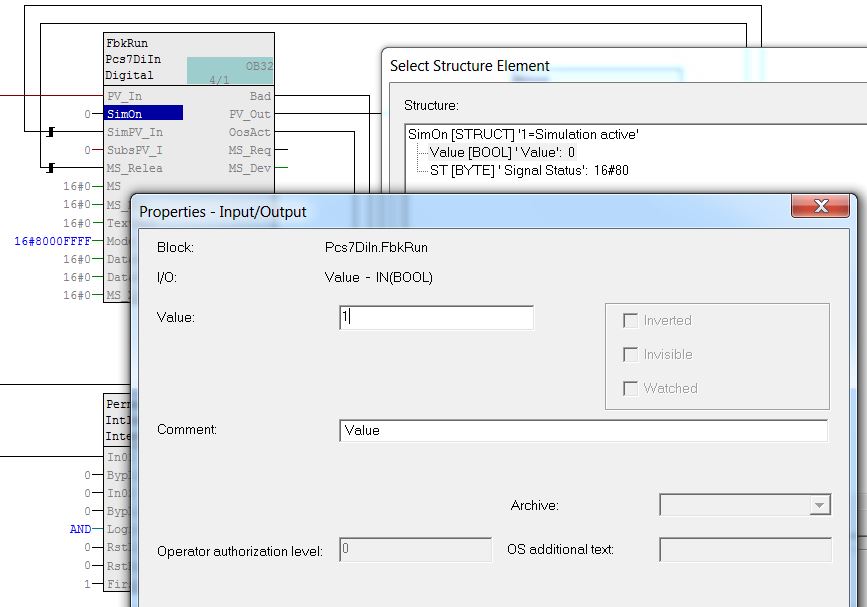
• Interconectar parámetro Motor.Start con FbkRun.SimPV_In. Esta interconexión se realiza en el CFC del motor para simular la señal de retroalimentación del motor en marcha. Primero haga clic en el parámetro Motor.Start y luego haga clic en el parámetro FbkRun.SimPV_In.


• FbkRun.Sim_On = 1. Activar simulación del bloque. Haga doble clic en el parámetro FbkRun.Sim_On y configure el parámetro Sim_On con el valor 1 (verdadero).

• Hacer interconexiones de campo. FbkRun.PV_In interconectado con TCR0802A_YS (entrada digital). Primero, elimine la conexión existente con el texto "feedback run" (elemento de menú Delete Interconnections). Para realizar una interconexión de direcciones, haga clic con el botón derecho en el parámetro y seleccione Interconnection to Address...



• Interconexión hecha con la entrada digital TCR0802A_YS.

• OutStart.PV_Out interconectado con TCR0802A_YC (salida digital). Primero, elimine la conexión existente con el texto "output start" (elemento de menú Delete Interconnections).

Channel Blocks
Varios tipos de channel blocks se suministran en la biblioteca del PCS 7 para el procesamiento de señales de entrada y salida. Channel Blocks son bloques listos (FBs) que tratan las señales de E/S del sistema.
La función "Generate module drivers" interconecta y configura los I/O necesarios automáticamente dentro de los CFCs. La función se llama y se ejecuta si se produce alguna modificación de hardware cuando el programa es compilado.
Standard channel blocks: Pcs7AnIn, Pcs7AnOu, Pcs7DiIn, Pcs7DiOu, Pcs7DiIT
FF/PA channel blocks: FbAnIn, FbAnOu, FbDiIn, FbDiOu
Compilando y Descargando AS
Uma AS pode ser compilada e descarregada para um controlador por diversos meios:
Una AS se puede compilar y descargar en un controlador por diversos medios:
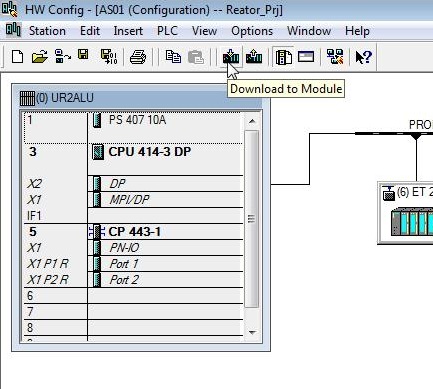
1 – A través del HW Config (Component View > AS > Hardware) para compilar y descargar la configuración de hardware para la CPU.
 Botón Guardar y compilar
Botón Guardar y compilar
 Botón Compilar
Botón Compilar
2 – A través de NetPro (Component View > Menu Options > Configure Network) para compilar y descargar la configuración de redes y conexiones.

3 – A través de CFC y SFC.

Botón Compilar
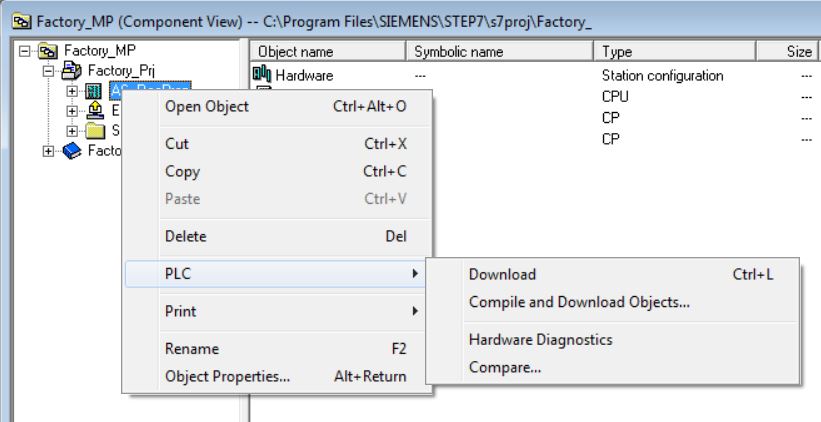
4 – A través de SIMATIC Manager para compilar y descargar objetos individualmente en un multiproyecto.
Proyecto Crushing Soy
• Compilar AS. Haga clic derecho en Factory_Prj y seleccione PLC > Compile and Download Objects. Seleccionar opción Compile Only. Haga clic en Start.

• Haga clic en Yes para confirmar.

• Log de compilación (sin errores).

Simulación
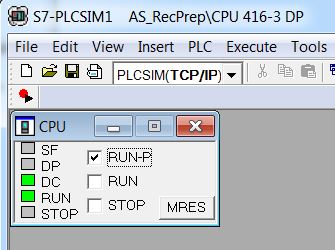
• Abrir PLCSim (Windows Explorer > All programs > Siemens Automation > Options & Tools > S7-PLCSIM Simulating Modules).

• Download de AS a PLCSim. En SIMATIC Manager Component View, haga clic derecho en AS_RecPrep y seleccione PLC > Download. No se recomienda utilizar la opción Compile and Download Objects... con PLCSim.
• Haga clic en Yes para confirmar.

• Cambiar modo de la CPU en PLCSim para RUN-P (en ejecución y liberado para programación).
• Abrir CFC TCR0802A. Hacer download al simulador. Haga cli en el botón Download.

• Seleccionar opción para descargar todo el programa. La CPU irá al modo Stop antes de hacer el download. Haga clic en OK.

• Confirmar parada de la CPU y el download. Haga clic en Yes.
• Restart de la CPU.
• Poner Test Mode en ON.

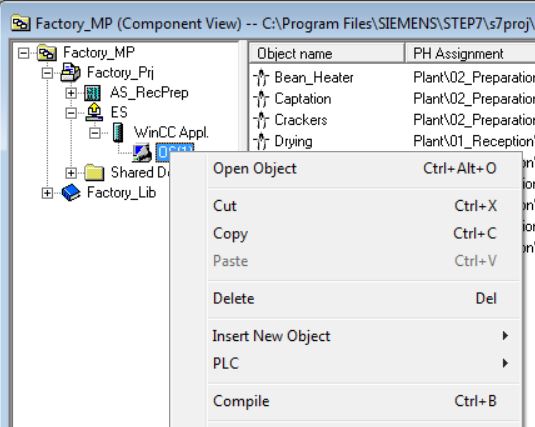
• Compilar OS. Haga clic derecho en el proyecto WinCC OS(1) y seleccionar elemento de menú Compile.
• Haga clic en Next en la ventana de introdución.

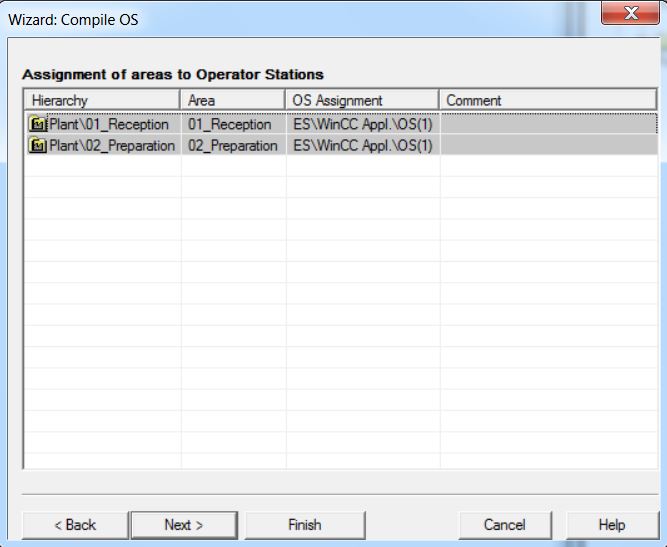
• Asignar areas a Operator Stations. Haga clic en Next.
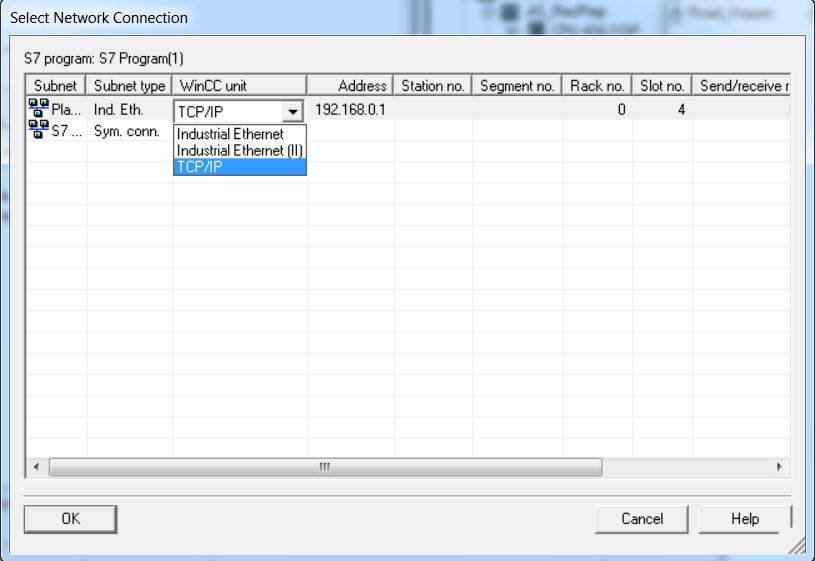
• Seleccionar conexión de red TCP/IP para simulación. Haga clic en el botón Connection.

• Seleccionar Plantbus - TCP/IP. Haga clic en Next.
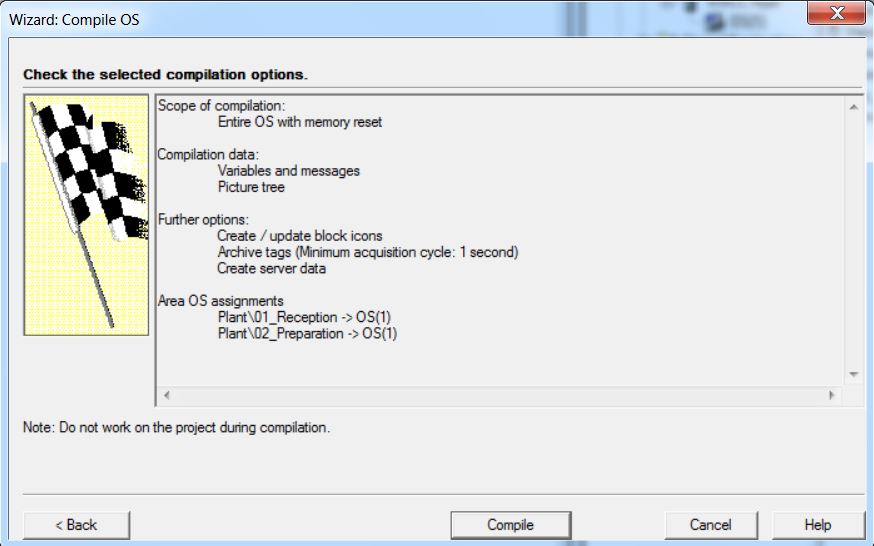
• Seleccionar los datos deseados e el alcance de la compilación. Haga clic en Next.

• Después de la primera compilación, aparece la ventana con opciones para compilar Tags and messages, además de las opciones de alcance Entire OS (compilación completa, con o sin memory reset) y Changes (solo nuevos cambios).
• Haga clic en el botón Compile.
• Opción para ver log de compilación.


• Abrir WinCC Explorer. Haga clic derecho en OS(1) y seleccione elemento de menú Open Object.
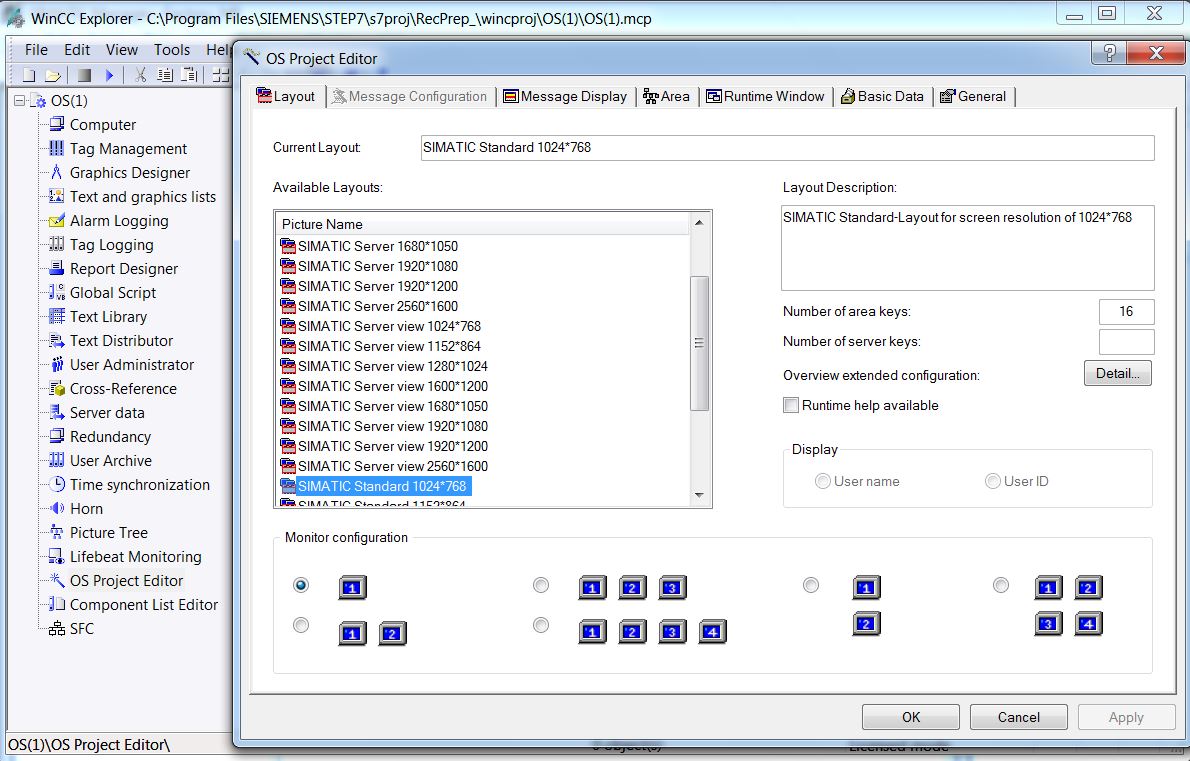
OS Project Editor - Layout
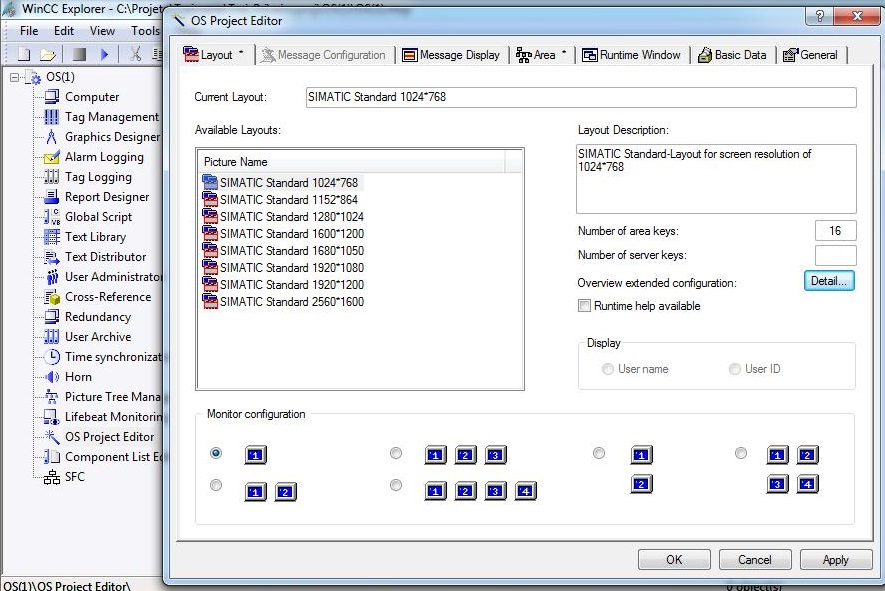
Avaliable Layouts – opciones de resolución de pantalla del proyecto.
Current Layout – resolución de pantalla seleccionada.
Monitor configuration – número y disposición de monitores.
Overview extended configuration – Detail... La overview area, en la parte superior de las pantallas contiene una serie de botones que representan áreas de la planta. Por defecto se presentan 16 botones. Los ajustes de los botones se realizan en Overview extended configuration.
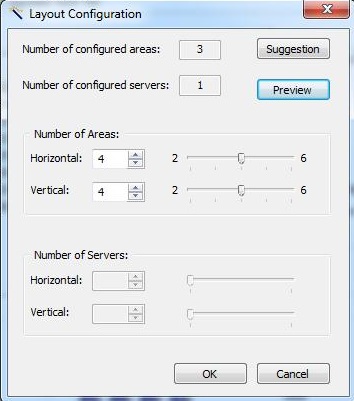
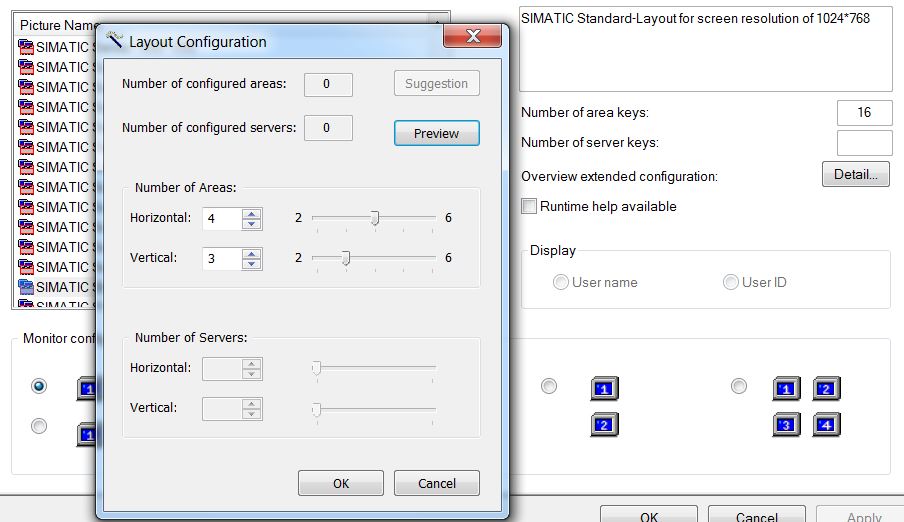
Number of Areas: determina el número reservado de botones para áreas en el overview.
Opción Horizontal = 4 y Vertical = 4. Preview:

Opción Horizontal = 2 y Vertical = 3. Preview:

Proyecto Crushing Soy
• Abrir OS Project Editor.
• Haga cli en el botón Detail del Overview extended configuration. Cambiar número de areas del proyecto Factory_Prj a Horizontal = 4 y Vertical = 3.
• Haga clic en el botón Preview. Haga clic en OK o Apply del OS Project Editor. Cerrar OS Project Editor.

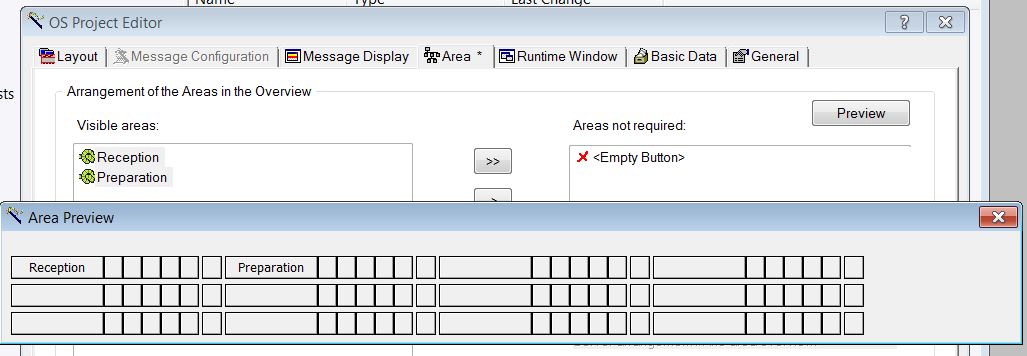
Area
En la pestaña Area del OS Project Editor, es posible ordenar las áreas en el overview y insertar botones vacíos (empty buttons).

Hacer cli en el botón Preview:
Picture Tree Manager
De acuerdo con su configuración de planta, pictures se insertan en la plant hierarchy para mostrar el proceso para el operador de la planta. Puede insertar una picture por hierarchy folder. Insertar pictures en la plant hierarchy da lugar a una picture hierarchy que sirve como importante aspecto al gestionar las pantallas de proceso. Al compilar el OS, el Picture Tree Manager tiene misma jerarquía de la plant hierarchy.
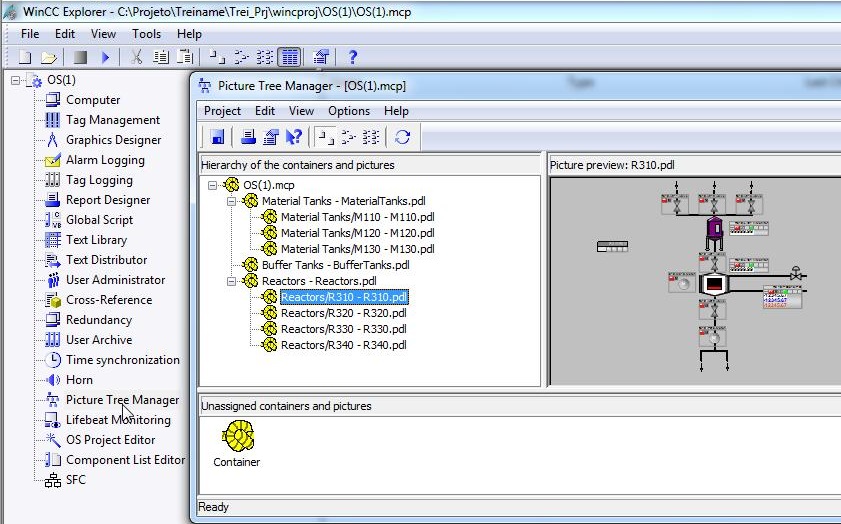
La jerarquía en Picture Tree Manager se compone de contenedores. Containers son agrupaciones de pictures.
Control and Monitoring Attributes
Para abrir Control and Monitoring Attibutes de una hierarchy folder en la Plant View de SIMATIC Manager, abra las propiedades de la carpeta deseada en la lengüeta Control and Monitoring Attibutes (ex. Plant\Material Tanks\M110 > Object Properties).
El nombre de una picture en la OS puede ser diferente de su nombre en la plant hierarchy, cambiando la propiedad Picture name for OS.
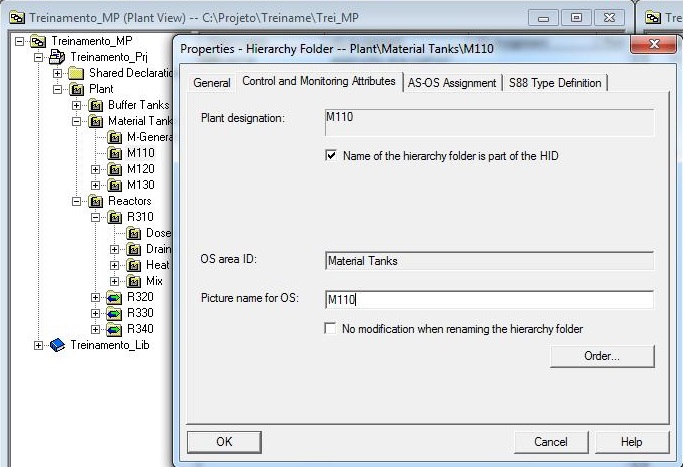
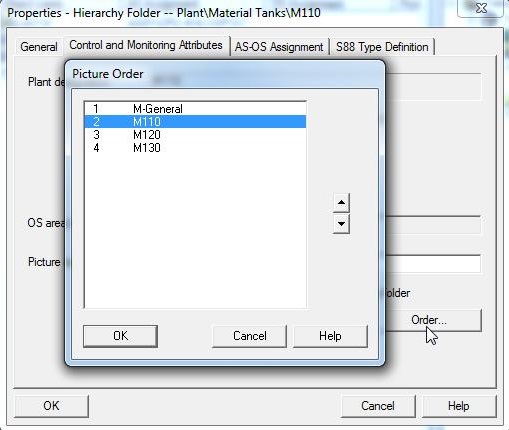
El orden de las imágenes de un área de área se puede cambiar haciendo clic en el botón Order...
Proyecto Crushing Soy
• Abrir Picture Tree Manager.

• Cambiar nombre de los Containers como se indica en las imagenes.



Nota: Si en una próxima compilación de OS seleccionamos la opción para compilar Picture Tree, los cambios realizados en Picture Tree se perderán (en este caso, los valores de Container Name).
• Abrir Wincc Explorer y Tag Management.


• Cambiar Logical device name del protocolo TCP/IP en el Simatic S7 Protocol Suite. Haga clic con el botón derecho en TCP/IP y seleccione el elemento del menú System Parameters. Seleccione la pestaña Unit y cambie el nombre del Logical device a PLCSim (TCP/IP). Cerrar Tag Management.


• Ejecutar proyecto WinCC y arrancar motor TCR0802A. En WinCC Explorer, seleccionar File > Activate. Navegue hasta la picture Road Hopper (en el menú Reception) para mostrar TCR0802A.

Atención - en algunas versiones de PCS7 hay un problema con la descripción en algunos faceplates, como de válvula y de motor. Para solucionarlo, sigue los pasos:
1 - En WinCC Explorer, abrir Text Library.

2 - Seleccionar lineas 1 hasta 10.
3 - Hacer clic derecho en las lineas y seleccionar elemento de menú Delete.

4 - Cerrar Text Library.
Generando block icons
Block icons se utilizan para el control por parte del operador y la supervisión de plantas o unidades en modo de proceso. Los block icons son solicitados por instancias de bloque, que se pueden controlar y supervisar desde CFCs.
Puede especificar si desea crear block icons para cada una de las pictures de proceso en el PCS 7 OS y si desea almacenarlos en esta picture de proceso.
Puede configurar los siguientes ajustes en la Plant View o en Process Object View antes de compilar la OS:
• Seleccionar la opciones "Derive block icons from the plant hierarchy" para cada picture de proceso.
• Si selecciona un objeto "Multiproject", "Project" o "Hierarchy folder" y ejecuta la función "Create/Update Block Icons", los block icons se insertan automáticamente en las pictures de proceso según la Plant Hierarchy y enlazan a la correspondiente Process Tag.
Generando units y operator texts
Faceplates, que muestran la siguiente información de bloque, se utilizan para mostrar el proceso al operador en el modo de proceso.
• Measured values
• Operating limits
• Units
• Operator texts
Estos textos ya están incluidos en los tipos de bloques que utiliza para un CFC. Units y operator texts solo se muestran en el idioma almacenado para los tipos de bloque, independientemente de la selección de idioma actual.
Unit y operator texts de los tipos de bloques proporcionados por bibliotecas (por ejemplo, PCS 7 Advanced Process Library) solo están disponibles en inglés.
Usted puede cambiar unit y operator texts (ej. traducir a un idioma diferente) en CFC en las propiedades de tipo de bloque o instancia de bloque.
Siguiente
Usuario no registrado. Compre el entrenamiento en jats.com.br.