Motor
• Criar lógica de programação para motor P113.
A lógica deve comandar a partida e parada do motor. A saída digital P113 é o sinal de comando para o motor (em 0 – parar; em 1 – rodar. A entrada digital P113_O é o retorno de status do motor (em 0 – motor parado; em 1 – motor rodando). O comando poderá ser feito manualmente pelo operador ou automaticamente por exigência do processo. O motor pode rodar intertravado ou não (em manutenção). Três alarmes são gerados na lógica: 1 – Motor não partiu; 2 – Motor não parou; 3 – Desarme do motor.
• Criar variáveis:
| AM_P113 | BOOL | %M0.4 | Botão auto/manual motor P113 |
| CA_P113 | BOOL | %M0.5 | Comando automático motor P113 |
| CR_P113 | BOOL | %M0.6 | Botão comando manual rodar motor P113 |
| CP_P113 | BOOL | %M0.7 | Botão comando manual parar motor P113 |
| MAN_P113 | BOOL | %M1.0 | Botão manutenção motor P113 |
| BLQ_P113 | BOOL | %M1.1 | Bloqueio intertravamento motor P113 |
| ALM_P113 | BOOL | %M1.2 | Alarme motor P113 |
| M1_P113 | BOOL | %M1.3 | Mensagem motor P113 não partiu |
| M2_P113 | BOOL | %M1.4 | Mensagem motor P113 não parou |
| M3_P113 | BOOL | %M1.5 | Mensagem desarme motor P113 |
| TMR_FLT | BOOL | %M1.6 | Auxiliar timer alarmes motor P113 |
| RST | BOOL | %M1.7 | Reset de Alarmes |
| AUX_P113_O | BOOL | %M2.0 | Auxiliar desarme motor P113 |
| SIMULA | BOOL | %M2.1 | Simular processo |
| ACK | BOOL | %M2.2 | Reconhecimento de alarmes |
| ALW_ON | BOOL | %M2.3 | Sempre em 1 |
• Criar bloco MOTOR do tipo Function.
• Chamar bloco MOTOR em Main [OB1].
Lógica
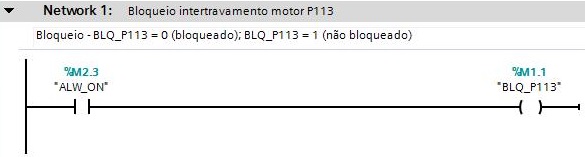
Network 1
BLQ_P113 – bit de bloqueio por intertravamento (0 = motor bloqueado; 1 = motor liberado). Nessa rung BLQ_P113 recebe o valor 1, pois não existe intertravamento para o motor.
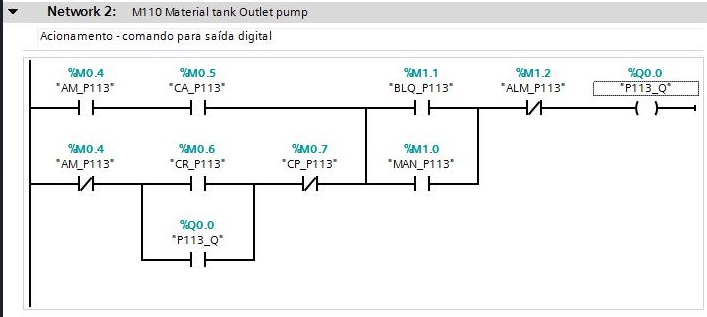
Network 2
Comando para rodar motor P113 (move 1 para a saída Q). O motor parte em duas condições:
• quando em manual (AM_P113 = 0) e o botão do operador recebe o comando rodar (CR_P113 = 1). O comando parar (CP_P113 = 1) para o motor quando rodando em manual.
• quando em automático (AM_P113 = 1) e o comando em automático manda rodar (CA_P113 = 1).
Quando em manutenção (MAN_P113 = 1), o intertravamento (BLQ_P113 = 1) não é considerado. Quando o motor entra em alarme, o comando P113 recebe o valor 0.
Network 3
Temporizador ativado após comando de partida ou parada do motor.
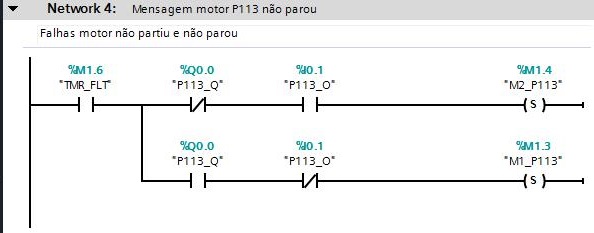
Ao partir o motor, o comando P113 (saída digital) vai para 1 e a lógica aguarda o status de feedback do motor vá para 1 (P113_O). Se P113_O não for para 1 em até 10 segundos, uma indicação de falha de partida é ativada (M1_P113 = 1) e o comando P113 vai para 0.
Ao parar o motor, o comando P113 (saída digital) vai para 0 e a lógica aguarda o status de feedback do motor vá para 0 (P113_O). Se P113_O não for para 0 em até 10 segundos, uma indicação de falha de parada é ativada (M2_P113 = 1). O comando P113 permance em 0.
O data block DB_TON_MOTOR foi criado para a instrução TON.

Networks 4 e 5
Falhas apresentadas pelo motor:
M1_P113 – Motor não partiu.
M2_P113 – Motor não parou.
M3_P113 – Motor desarmou. Essa falha é ativada quando o comando para o motor (P113) está em 1 (motor rodando) e o feedback P113_O vai de 1 para 0 (contato detecção de transição negativa). Quando o motor é parado via comando do operador (CP_P113 = 1), via comando automático (CA_P113 = 1) ou via intertravamento de processo (BLQ_P113 = 0), primeiro o comando P113 vai para 0 para só depois o feedback P113_O ir para 0 também. Quando o inverso ocorre, P113_O vai primeiro para 0 do que P113, indica um desarme (provavelmente sobrecorrente do motor).

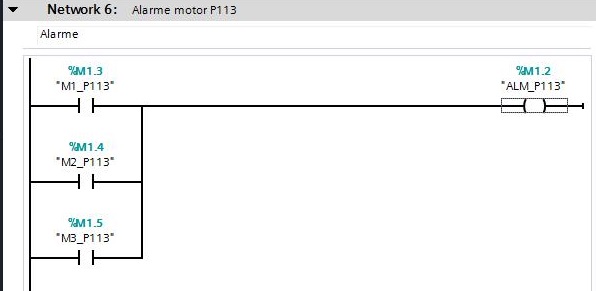
Network 6
Os três tipos de falhas do motor acionam a variável ALM_P113. Essa variável quando atuada (em 1) proibe o comando para o motor rodar (P113 sempre em 0).
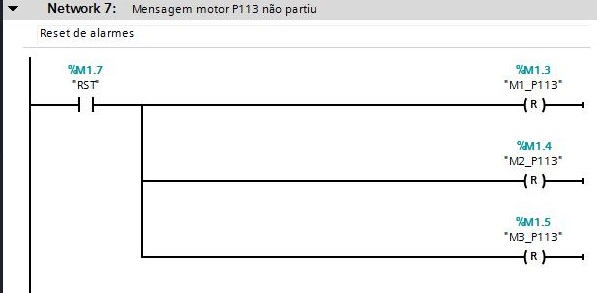
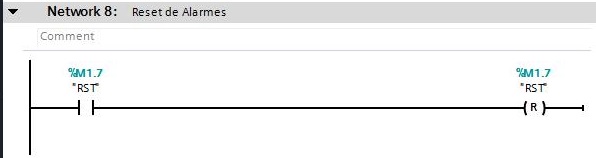
Networks 7 e 8
O botão Reset manda para 0 as falhas do motor. Na sequência, a própria variável vai para 0 (RST = 0). Portanto, o comando de reset é dado pelo operador (RST = 1) e retirado pelo PLC (RST = 0) logo após limpar as falhas do motor.
Networks 9 e 10
Reset dos botões de comando do operador. Assim como o botão Reset, o botões de comando manual do operador para rodar o motor (CR_P113) e de comando manual do operador para parar o motor (CP_P113) é acionado pelo operador e resetado pelo PLC logo após atuar na lógica de comando.

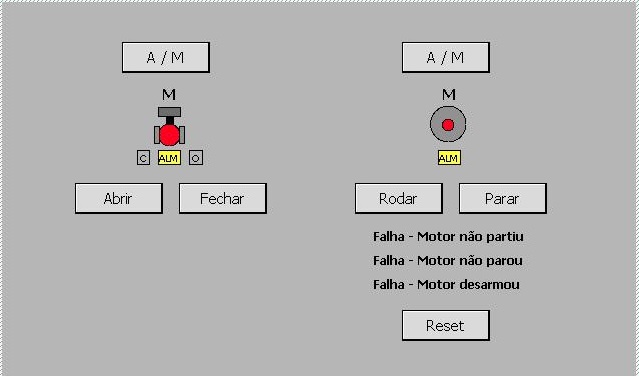
• Editar Root screen:
1 - Inserir button auto/manual com ação para colocar o motor em automático.
Propriedades:
Tab Properties
• Inserir “A / M” em Text when button is “not pressed”.
Tab Events
• No evento Release (ativo quando botão do mouse é solto sobre o objeto) adicionar function InvertBit com tag AM_P113.
2 - Inserir button Rodar com ação para rodar o motor em manual.
Propriedades:
Tab Properties
• Inserir “Rodar” em Text when button is “not pressed”.
Tab Animations
Display > Visibility – Tag: AM_P113 = 0 (só mostrar botão quando motor estiver em manual).
Tab Events
• No evento Release (ativo quando botão do mouse é solto sobre o objeto) adicionar function SetBit com tag CR_P113.
3 - Inserir button Parar com ação para parar o motor em manual.
Propriedades:
Tab Properties
• Inserir “Parar” em Text when button is “not pressed”.
Tab Animations
Display > Visibility – Tag: AM_P113 = 0 (só mostrar botão quando motor estiver em manual).
Tab Events
• No evento Release (ativo quando botão do mouse é solto sobre o objeto) adicionar function SetBit com tag CP_P113.
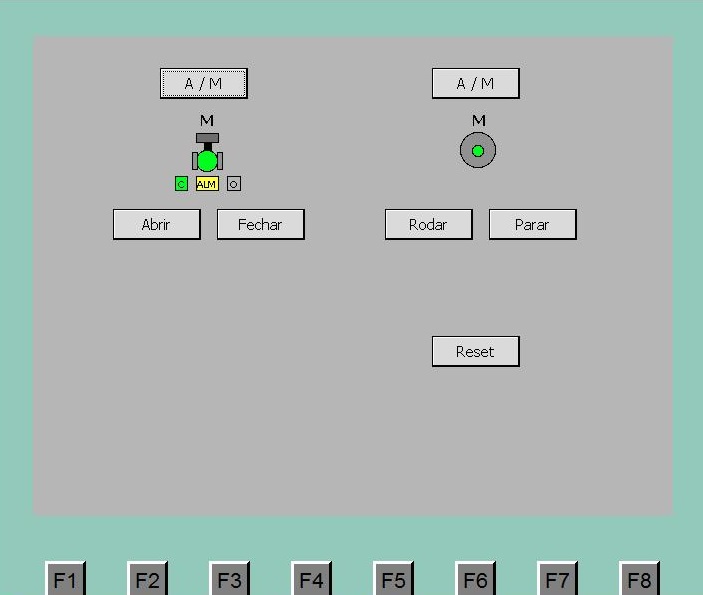
4 – Inserir circle para indicar motor rodando ou parado.
Propriedades:
Tab Properties
Appearance > Background – Color: 255, 0, 31 – Solid
Layout > Radius: 6
Tab Animation
Display > Appearance – Tag: P113_O = 0 (vermelho – parado) e P113_O = 1 (verde – rodando).
5 – Inserir Text field com a letra M indicando motor em manual .
Propriedades:
Tab Properties
General – Text = “M”
Tab Animation
Visibility – Tag: AM_P113 = 0.
6 – Inserir Text field com a letra A indicando motor em automático .
Propriedades:
Tab Properties
General – Text = “A”
Tab Animation
Visibility – Tag: AM_P113 = 1.
7 – Inserir Text field Falha – Motor não partiu.
Propriedades:
Tab Properties
General – Text = “Falha - Motor não partiu”
Tab Animation
Visibility – Tag: M1_P113 = 1.
8 – Inserir Text field Falha – Motor não parou.
Propriedades:
Tab Properties
General – Text = “Falha - Motor não parou”
Tab Animation
Visibility – Tag: M2_P113 = 1.
9 – Inserir Text field Falha – Motor desarmou.
Propriedades:
Tab Properties
General – Text = “Falha - Motor desarmou”
Tab Animation
Visibility – Tag: M3_P113 = 1.
10 - Inserir button Reset com ação de resetar as mensagens de alarme.
Propriedades:
Tab Properties
• Inserir “Reset” em Text when button is “not pressed”.
Tab Events
• No evento Release (ativo quando botão do mouse é solto sobre o objeto) adicionar function SetBit com tag RST.
• Compilar PLC_1. Clicar com o botão direito do mouse sobre PLC_1 e selecionar item de menu Compile > Hardware and software (only changes).
• Compilar HMI_1. Clicar com o botão direito do mouse sobre HMI_1 e selecionar item de menu Compile > Hardware and software (only changes).
• Simular projeto Reator.
• Selecionar device PLC_1, clicar com botão direito do mouse e selecionar item de menu Start simulation.
• Selecionar protocolo TCP/IP no S7-PLCSIM.
• Descarregar programa de PLC_1 no S7_PLCSIM. Clicar em Load.
• Visualizar janela de S7-PLCSIM e colocar PLC no modo RUN-P.
• Clicar com o botão direito do mouse sobre PLC_1 e selecionar item de menu Go online.
• Selecionar device HMI_1, clicar com botão direito do mouse e selecionar item de menu Start simulation.
• Programar variável ALW_ON para permanecer sempre em 1. Essa variável poderá ser usada em diversas lógicas.

• Simular motor.
Próximo
Usuário não registrado. Compre o treinamento em jats.com.br.