SIEMENS SIMATIC S7 + WINCC
Sirius 3RW44 Soft Starter
Soft Starter Sirius 3RW44
The Sirius 3RW44 soft starter is an electronic motor control unit that optimizes the starting and stopping of three-phase asynchronous motors.
Numerical classification of Sirius 3RW44 soft starter
Using model 3RW44 22-6BC44 as an example:

I – designation of the basic unit: Semiconductor AC motor control device (soft starter).
II – equipment version: 4 High End soft starter.
III – operating power band Pe (to Ue 400V):

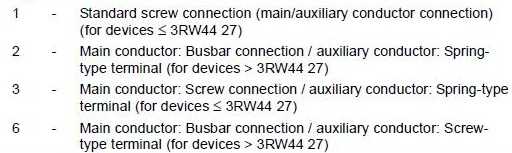
IV – connection type:
V – special function: B - with bypass.
VI – number of controlled phases: C - all 3 controlled phases.
VII – supply voltage band Us: 3 – 115 VAC; 4 – 230 VAC.
VIII – operational voltage band Ue: 4 – 200 a 460 V; 5 – 400 a 600 V; 6 – 400 a 690 V.
Profibus DP communication module
Data transmission options:
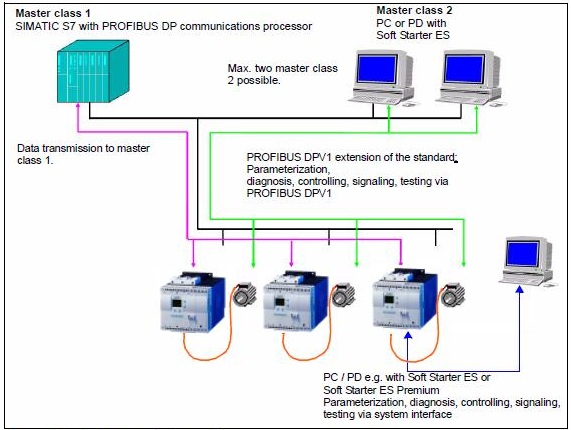
Principles of communication:
The following image illustrates the communication principles, whose different data are transmitted depending on the mode of execution of the master and the slave:

Telegrams
• Cyclic communication data between the Profibus DP master and the Sirius 3RW44 soft starter (2 read bytes and two write bytes):

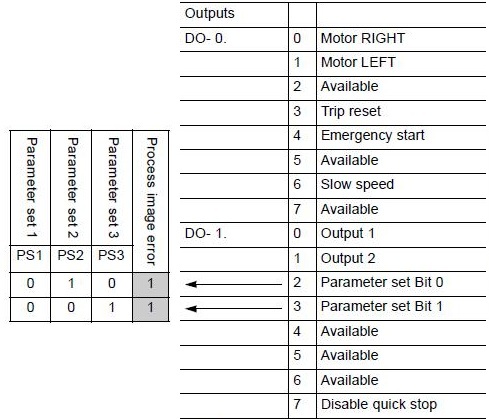
• Cyclic write data from the Profibus DP master to the Sirius 3RW44 soft starter (2 bytes):
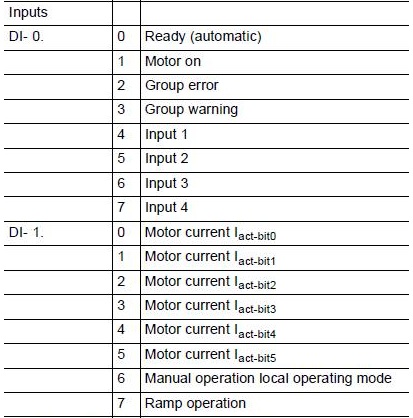
• Cyclic read data from the Sirius 3RW44 soft starter to the Profibus DP master (2 bytes):
Boiler Project
• Create Function Block for Sirius soft starter. Right-click on the Blocks folder and select Insert New Object > Function Block menu item.
• Set Symbolic Name to FB_SIRIUS, Symbol Comment with Function Block Soft Starter Sirius and the language to LAD.
• Open function block FB6 FB_SIRIUS for editing. In Component View, double-click on the function block.
• In Interface, enter the IN input parameters:
| Name | Type | Description | S7_m_c |
|---|---|---|---|
| YC | Bool | FB_Motor command | |
| RST | Bool | Reset | |
| IN_BUS | Int | Reading data | |
| BASE_I | Real | Current calculation base | |
| NO | Int | Profibus DP address | True |
• Enter the output parameters:
| Name | Type | Descrição | S7_m_c |
|---|---|---|---|
| OUT_BUS | Int | Writing data | |
| CORRENTE | Real | Current | True |
| SFT_OK | Bool | Soft ready | True |
| YS | Bool | Soft status | True |
| FG | Bool | General fault | True |
| AG | Bool | General alarm | True |
| OPE_R | Bool | Ramp operation | True |
| LR | Bool | Local/Remote | True |
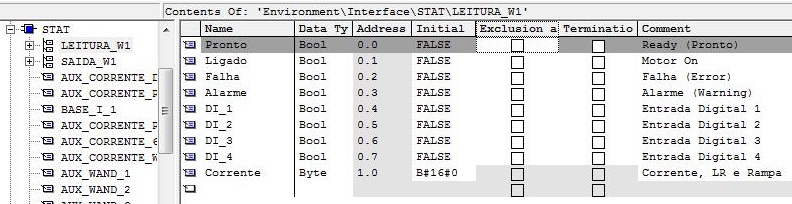
• Enter the STAT parameters:
| Nome | Tipo |
|---|---|
| LEITURA_W1 | Struct |
Structure:
| Name | Type | Description |
|---|---|---|
| Pronto | Bool | Ready |
| Ligado | Bool | Motor on |
| Falha | Bool | Fault (Error) |
| Alarme | Bool | Alarm (Warning) |
| DI_1 | Bool | Digital input 1 |
| DI_2 | Bool | Digital input 2 |
| DI_3 | Bool | Digital input 3 |
| DI_4 | Bool | Digital input 4 |
| Corrente | Byte | Current, LR and Ramp |
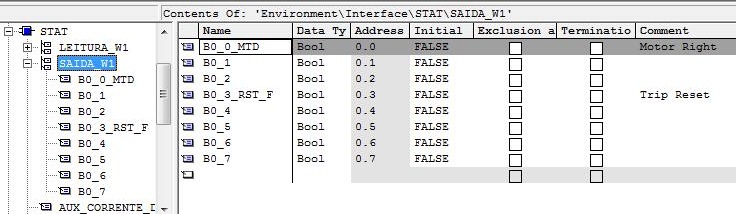
| Name | Type |
|---|---|
| SAIDA_W1 | Struct |
Structure:
| Name | Type | Description |
|---|---|---|
| B0_0_MTD | Bool | Motor Right |
| B0_1 | Bool | |
| B0_2 | Bool | |
| B0_3_RST_F | Bool | Trip Reset |
| B0_4 | Bool | |
| B0_5 | Bool | |
| B0_6 | Bool | |
| B0_7 | Bool |
| Name | Type | Description |
|---|---|---|
| AUX_CORRENTE_DI | DInt | |
| AUX_CORRENTE_REAL | Real | |
| BASE_I_1 | Real | |
| AUX_CORRENTE_REAL_2 | Real | |
| AUX_CORRENTE_WORD | Word | |
| AUX_CORRENTE_6BITS | Int | |
| AUX_WAND_1 | Word | |
| AUX_WAND_2 | Word | |
| AUX_WAND_3 | Word | |
| AUX_CORRENTE_WORD_2 | Word | |
| AUX_CORRENTE_WORD_3 | Word | |
| AUX_CORRENTE_INT_1 | Int | |
| AUX_CORRENTE_INT_2 | Int | |
| AUX_CORRENTE_WORD_4 | Word |
• Insert logic for soft start Sirius 3RW44.
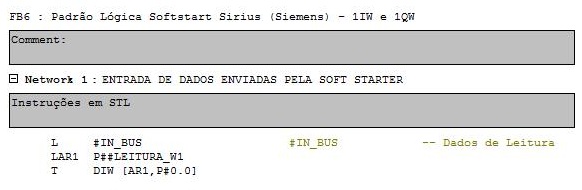
Network 1
Data movement from the IN_BUS input parameter (soft starter read word) to the struct parameter LEITURA_W1. STL instructions. Loading of #IN_BUS in the accumulator (L) and transfer to READING_W1 (LAR1 and T).
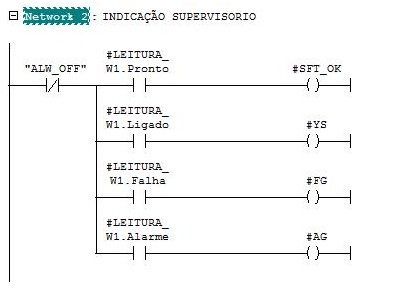
Network 2
Movement of status bits to the supervisory.
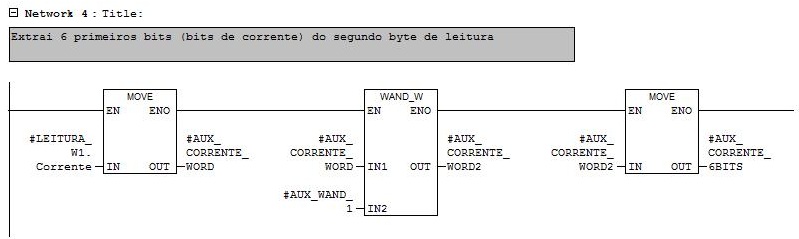
Network 3
Movement of values for auxiliary parameters in the extraction of bits from byte 2.
63 – 00111111 – extraction of the first 6 bits (0 to 5) on the right with AND logic (current).
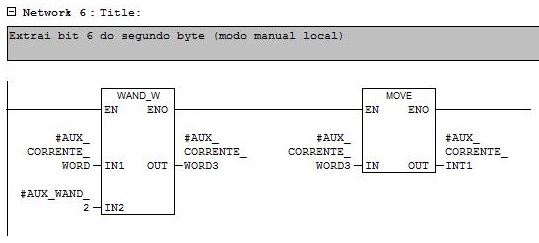
64 – 01000000 – extraction of bit 6 with AND logic (local/remote).
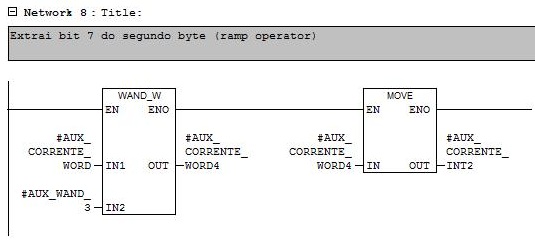
128 – 10000000 – bit 7 extraction with AND logic (ramp operator).

Network 4
Extraction of the first 6 bits of the second reading byte to form the current.
Network 5
Adjusting the current value. The 6 bits of the current (values from 0 to 63 in decimal) represent values from 0 to 197% of the motor current. We use the formula y = (1.97 * Ie * x) / 63 or
y = 3.126984 * Ie * x ), where:
Ie = nominal current value (represents 100% of the current);
x = 6 read bits (0 to 63);
y = current value.

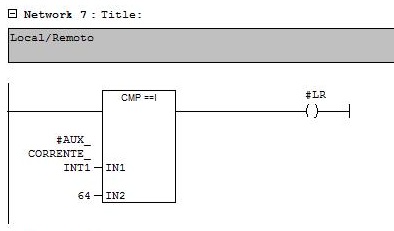
Networks 6 and 7
Extraction of bit 6 of the second reading byte to read the local/remote status of the soft.
Networks 8 and 9
Extraction of bit 7 of the second reading byte to read the soft ramp operator status.

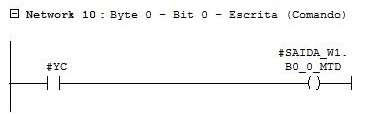
Network 10
Command to run the motor.
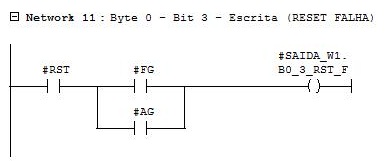
Network 11
Soft starter failure reset.
Network 12
Data movement from the struct parameter EXIT_W1 to the output parameter OUT_BUS (soft starter writing word). STL instructions.

• Open MOTORS function and insert FB_MOTOR and FB_SS_SIRIUS for the MT307 - Pneumatic Distributor Fan.
| Name | Block | DB | Input | Output |
|---|---|---|---|---|
| MT307 | FB_MOTOR | DB29 | ||
| MT307SS | FB_SIRIUS | DB20 | IW532..533 | QW522..523 |
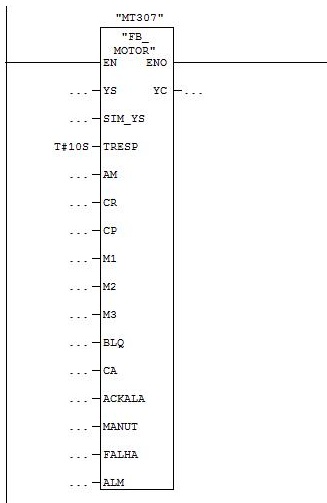
Network 1
Function block instance FB_MOTOR for MT307. Response time set for activation and deactivation in 10 seconds.
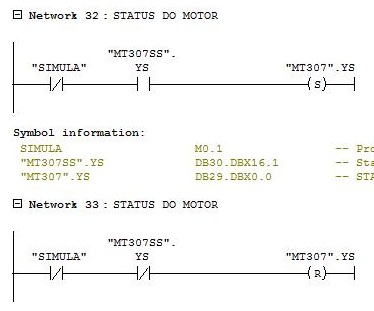
Networks 2 and 3
Movement of motor status running YS = 1 and motor stopped status YS = 0 from MT307SS to MT307.
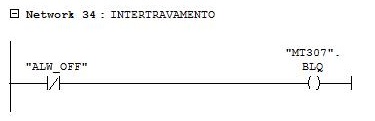
Network 4
Force parameter BLQ to 1 to enable the motor to start.
Network 5
Function block FB_SIRIUS instance for the MT307.
Input parameters:
YC – receives output parameter YC from MT307 function block instance.
RST – reset alarm and fault (MT307.ACKALA).
IN_BUS - receives the soft starter read word address (IW532).
BASE_I – nominal current (Ex = 10 A).
NO – Profibus DP address (address 16 for MT307).
Output parameters:
OUT_BUS - receives the write word address for soft starter (QW522).
FG – general fault - writes to the FALHA input parameter of the function block MT307.

Network 6
Alarm acknowledgment.

• Select Operator Control and Monitoring for DB29 and DB30 of the MT306.
• Compile AS and OS.
• Create SIRIUS.pdl with 400 x 200 size.
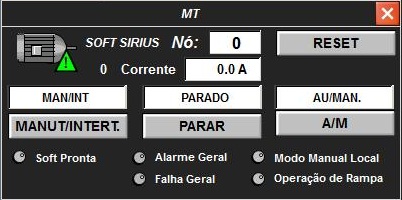
• Insert MT307 in the process picture.
C script to show the PW_OBJ picture window object in the current picture.
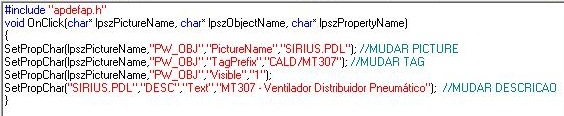
The Picture Name property of the PW_OBJ picture window receives the name of the SIRIUS.PDL picture.
The TagPrefix property of the PW_OBJ picture window is set to CALD/MT307. This instruction adds the text “CALD/MT307” at the beginning of all object dynamizations within the picture window.
• Insert MT307 engine alarm messages in WinCC Alarm Logging.
• Compile and download AS. Compile OS and run the project. Test motor.